机械臂电气接口
1 机械臂底座电气接口
1.1 底座介绍
A. 底座上侧接口、显示屏和按钮如图 2-3 所示:
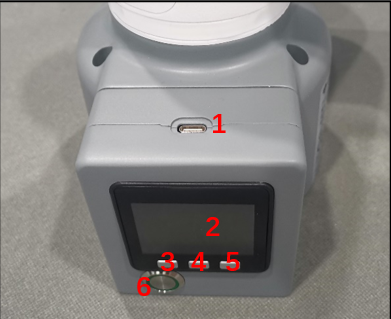
图 2-3 底座正面图
B. 底座左侧接口如图 2-4 所示:

图 2-4 底座左侧图
C. 底座右侧接口如图 2-5 所示:
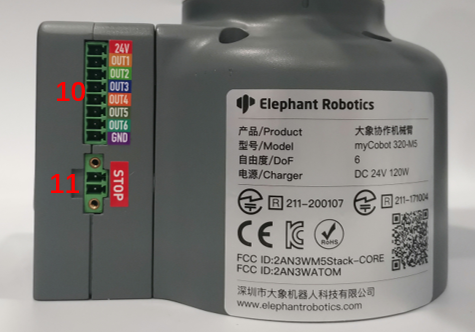
图 2-5 底座右侧图
1.2 底座接口说明
| 序号 | 接口名称 | 定义 | 功能 | 备注 |
|---|---|---|---|---|
| 1 | Type C | 通讯接口 | 与PC进行通讯 | 开发使用 |
| 2 | 显示屏 | 显示 | 配合按钮使用 | |
| 3 | 按钮 | 按钮A | 配合显示屏使用 | |
| 4 | 按钮B | |||
| 5 | 按钮C | |||
| 6 | 开关 | 电源开关 | 控制输入电源通断 | 带灯(通电灯亮) |
| 7 | DC/IO接口 | GND | GND | |
| IN6 | 数字输入信号 1~6 | 输入仅有NPN模式 | ||
| IN5 | ||||
| IN4 | ||||
| IN3 | ||||
| IN2 | ||||
| IN1 | ||||
| 24V | DC24V | |||
| 8 | Type C | 通讯接口 | 与PC进行通讯 | 开发使用 |
| 9 | 电源DC输入接口 | DC24V输入 | DC24V输入 | |
| 10 | DC/IO接口 | 24V | DC24V | |
| OUT1 | 数字输出信号 1~6 | 仅有PNP模式 | ||
| OUT2 | ||||
| OUT3 | ||||
| OUT4 | ||||
| OUT5 | ||||
| OUT6 | ||||
| GND | GND | |||
| 11 | 急停接口 | STOP | 急停回路接口 |
Type C接口:可用于和PC端连接通讯,开发人员使用
显示屏:使用2 inch的IPS屏幕,可用于显示myCobot通讯状态/配合按钮校正机器人原点等功能。
按钮A、按钮B和按钮C:配合显示屏进行功能操作使用。
电源开关:控制总电源输入的通断,关闭时,控制器也断电。
24V输出:内部DC24V,可供用户使用。
数字输入/数字输出:
包括 6 个数字输入信号和 6 个数字输出信号,用于与其他设备进行交互,与其他设备共同构成自动化系统中的重要组成部分。
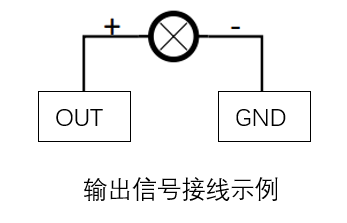
需要注意的是,输出信号为PNP形式,以下为外部接线示意图:
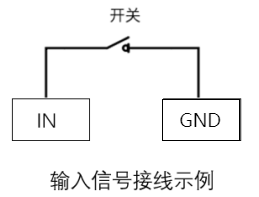
输入信号为NPN形式,以下为外部接线示意图:
电源DC输入接口:
使用KPPX-4P R7BFDC电源插座;可使用厂家配备的24V9.2A DC电源适配器给myCobot320进行供电。急停回路端子:与急停按钮盒连接,可用于控制机器人紧急停止。
注:机器人使用中必须接上急停开关,并确保急停开关回路处于连通状态。
2 机械臂末端电气接口
2.1 机械臂末端介绍
D. 机械臂末端接口示意如图 2-12 和图 2-13 所示:
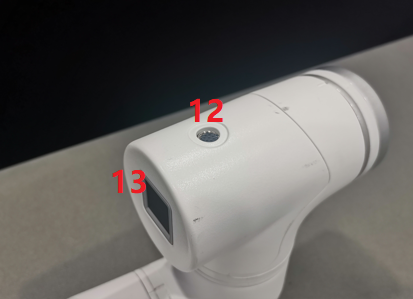
图 2-12 机械臂末端侧面图

图 2-13 机械臂末端侧面图
2.2 末端接口说明
| 序号 | 接口名称 | 定义 | 功能 | 备注 |
|---|---|---|---|---|
| 12 | M8航空插座 | 末端工具IO接口 | 与外部设备交互 | |
| 13 | Atom | Led+按钮 | 状态查看/拖动示教 | |
| 14 | Type C | 通讯接口 | 与PC进行通讯 | 更新Atom固件使用 |
| 15 | Grove | 开发人员使用 |
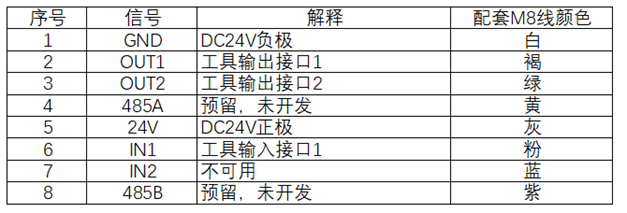
9. 末端工具IO接口:
如图所示是工具I/O图,myCobot 320 机器人提供了一路输入和两路输出。
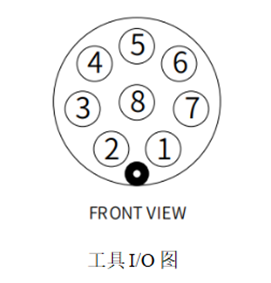
各个工具I/O端口的定义如下表所示,注意的是,工具I/O无论是输入还是输出都是PNP类型,接线方式同底部输出接口一致。
10. Atom:用于 5X5 RGB LED显示机械臂状态和按键功能(机器人进入拖动示教时使用)